�gӭ���R~�Ϻ�������ӿƼ�����˾
 ȫ������(w��)�ᾀ��
ȫ������(w��)�ᾀ��
13371980026
13371980026



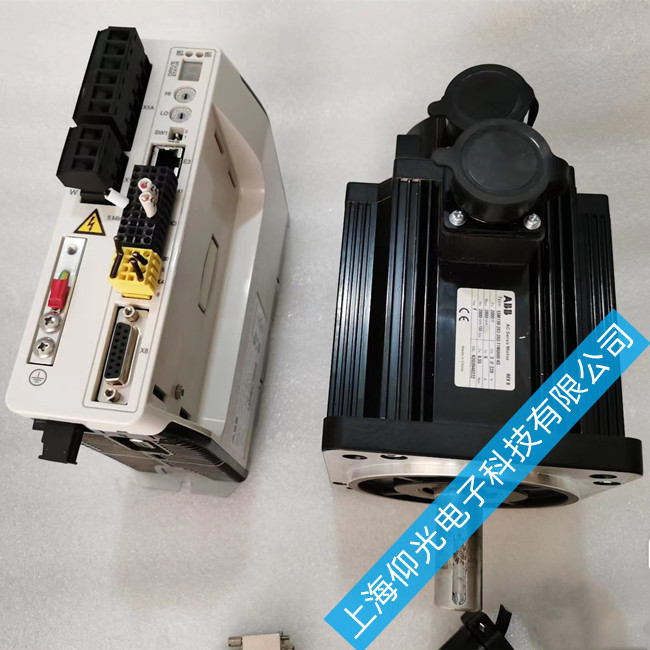
Ʒ�ƣ�ABB
�ϼܕr�g��2021-11-25 �l(f��)���ߣ�mwz
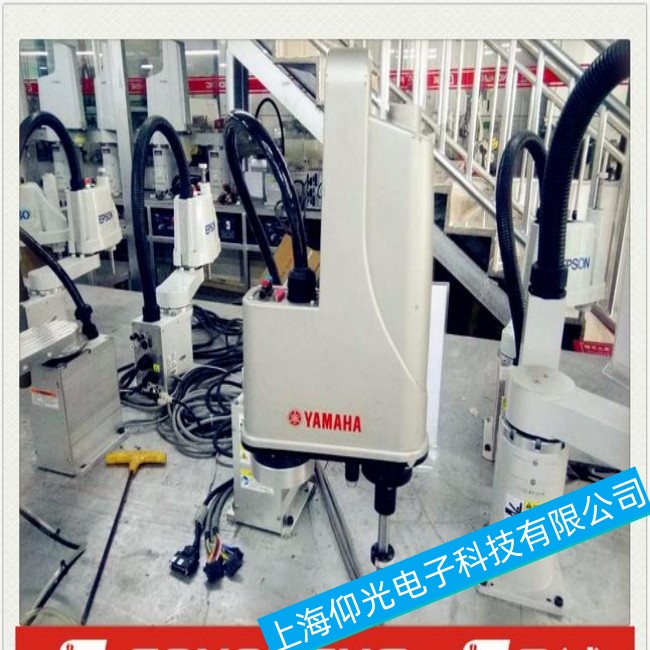
�a(ch��n)Ʒ������ABB�C�����ŷ�늙C�S�Гp�ĸ��Q,�Ϻ�ABB�C�����ŷ�늙C�S�Гp�ĸ��Q�S��,ABB�C�����ŷ�늙C�S�ޣ���������ͨ늙C�ľS�Ϻ�ABB�C�����ŷ�늙C�S�Гp�ĸ��Q�S���ޣ���Ҫ�S���ϲ�һ�ӣ��������(sh��)�ŷ�늙C��ͬ��늙C���D(zhu��n)���ώ��ŘO������ͨ���ϲ��܉��Q���}�����Բ��϶���׃�������P(gu��n)�I��ͬ�r��λҪ��Ҳ����ͨ늙C���ߡ�